Assuming a curve whose parametric representative is where is piecewisely of with respect to .
Assuming a function , if when
the limit of
exists, then the functional integral on curve is
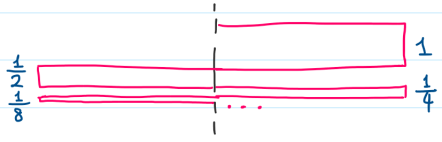
where is the infinitesimal arc length. It is not strict! See Figure 4.3 for counter example, where 2
points on the dashed black line could be arbitrarily close.
Figure 4.3: Counter example
Definition 4.4.1Arc length. Given a partition of the curve , , the total length of the broken
line is . If
then is called a rectifiable curve, is called the (arc) length of .
Proposition 4.4.2Mark , if
then is rectifiable and , i.e. , , such that for any partition of , .
Theorem 4.4.3If curve has a regular parametric representative of , i.e. where . Here , and
is a one-to-one correspondence of with . Then is a rectifiable curve, and its length is .
Definition 4.4.4Define where , its inverse function is , then is called the parametric
representative of under the arc-length parameter .
Definition 4.4.5Assuming , define the infinitesimal arc-length , then
Theorem 4.4.6The integral defined above has nothing to do with the selection of parametric
representative of .
ProofAssuming and and where , then
They are equivalent.
Example 4.4.1 Given in polar coordinate, seek its length and center of figure (centroid, the center
of mass when evenly distributed).
Length.
where
Therefore,
It is trivial that ,
in different coordinate systems.
Assuming in another coordinate system, the coordinate is , and
So the infinitesimal length is
Express it in quadratic form, we have
Example 4.4.2 Polar coordinate in 2-dimension.
We have
Therefore, the Gram matrix is
and
Surface integral of the first kind
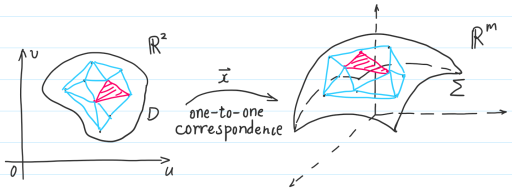
Definition 4.4.7Assuming a surface , its regular parametric representative of is where , ,
and are linear independent . Then .
How to calculate the area of the surface? One method is to divide the surface by triangles (Figure
4.4(a)), and seek the supremum of the total area of the triangles. Yet Schwartz constructed a
counter example in the century that even for a cylindrical surface, an arbitrary partition
could make the supremum of the total area become . Kunihiko proved in his works that if
the smallest angle of all triangles is greater than a given positive, then this method is
valid.
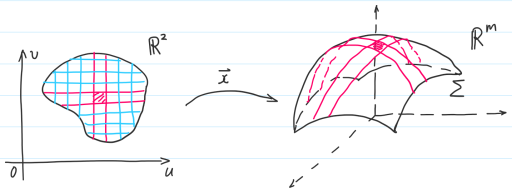
Another method is to divide the surface by grids (Figure 4.4(b)). The shape in red shadow is a
parallelogram composed by . Then we have
Therefore,
Theorem 4.4.8The definition above has nothing to do with the selection of parametric
representative of .
ProofAssuming where is a diffeomorphism of , then
(a)
Method
1
(b)
Method
2
Figure 4.4: Calculate the area of the surface
Example 4.4.3 Given where , , seek the area of .
Assuming , then
we have
then
So the area of is
Since the gradient vector points at the fastest direction of change of , and its magnitude equals to the
rate of change, the formula above also has a geometric meaning.
Example 4.4.4 Assuming surface is derived by a curve in plain rotating around axis by , seek the
area of .
Assuming , we have
then
So the area of is
Example 4.4.5 Given , longitude , latitude , seek the area of .
Assuming , we have
So the area of is
Particularly, take , we get the area of a spherical surface . Generally, we have
Surface in higher dimension. Assuming is a -dimension surface, its regular representative of
is
where all tangent vectors are linear independent. Define
Assuming is continuous, define
Note The definition above has nothing to do with the selection of regular representative.
, the surface degenerates to a curve , at this time
, theorem is proved.
,
Example 4.4.6 Assuming where and , here is called a hypersurface in . Seek the (-dimension) area
of .



















![∘ ------------------ ∘ ------------
dσ = [1 + (f′(x))2]f 2(x )dxd𝜃 = 1 + (f′(x ))2dxd 𝜃](main308x.png)









![[Im + ∇f (∇f )T]v = v](main320x.png)
![[Im + ∇f (∇f )T ]∇f = (1 + ∥∇f ∥2)∇f](main321x.png)





