Recall Green formula on the plain (flux – divergence). Assuming , is bounded and is piecewisely of ,
then
Theorem 4.7.1(Gauss formula in physical form) Assuming is a bounded closed domain, is
a surface piecewisely of , is the unit outer norm vector on . Given
is of , then
where
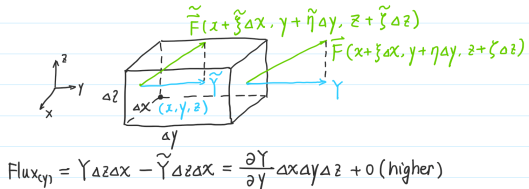
See Figure 4.10 for the geometric meaning of Gauss formula. Another meaning of Gauss formula is:
take a small ball at , then we have
Figure 4.10: Geometric meaning of Gauss formula
Assuming the form of second-order derivative corresponding with is , then the exterior differential
is
Since
we have
where is due to the natural positive direction of the space (outer norm vector). So another form of
Gauss formula is
Theorem 4.7.2(Gauss formula in mathematical form) .
Many formulas has the form above.
N-L formula (oriented, integral of the second kind). Assuming , then ; the outer norm
vector of points along at , along at . So
Assuming is a curve of , then
where is the starting point and destination of .
Green formula (flux – divergence).
Written in the form of derivative, we have
Gauss formula. Assuming is a bounded closed domain, we have
Written in the form of derivative, we have
Recall the circulation – rotation form of Green formula.
Written in the form of derivative, we have
Theorem 4.7.3(Stokes formula in physical form)
Theorem 4.7.4(Stokes formula in mathematical form)