Given , is the interior point, compose a set of bases in . Therefore
is called the coordinate based on .
Let , assuming is differentiable at , then
Mark
which is called the partial derivative of at over the component under the coordinate system . Define
the coordinate-projection function,
It’s a linear function, therefore, , ,
is also linear. When , we have
which is called the (total) differential of at . Here are functions, not numbers! Take as an example,
we have
Consider
When , consider a mapping
Here
is called the Jacobi matrix of at .
Chain rule.
Assuming
then
If is a function, i.e.
therefore
which is called the formal invariance of first-order derivative, meaning for any set of variables to
express , the form of the differential of remains invariant.
Example 2.2.1 Orthogonal coordinate and polar coordinate. Given ,
Find the relation between and . Notice that
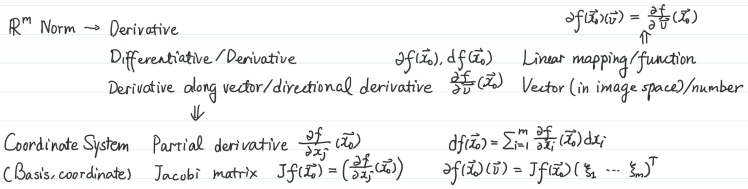
Figure 2.3: Concept Map
Theorem 2.2.1Assuming is continuous on , then is differentiable at every point in , and
ProofProve only . , we need
exists.
exists on near and is continuous at .
We use the 1-norm here, so it is needed to be proven that when ,
Since exists, for any , there exists such that
According to Lagrange’s intermediate theorem,
Since is continuous at , for any , there exists such that