Background. Implicit function theorem (IFT) is based on solving equations . They can be classified
into
Does any solution exist?
How many solutions does it give?
The continuity, derivability of the solution over arguments?
(1),(2) are related, since .
If has the dimension, then there exists a method to transform an implicit function into
an inverse mapping .
Theorem 2.5.1(IFT) Assuming , subjecting to
.
is invertible.
then there exists a neighborhood near and mapping such that for any , .
Proof
1.
Linearize near to get
where . Since , and for the solution to the linear function we let , therefore
It is the unique solution to the linear function. We hope the solution for the original
function has a form of
where . If exists and is derivable, then take the derivative over of
we can get
2.
Prove by mathematical induction.
, therefore are both continuous. Since is infinitely derivable, so , meaning .
.
3.
If exists and is continuous, then is derivable. Notice that
For , , there exists such that
where are related with the continuity of . Then
4.
Proof 1 (with fixed point): Notice that
where and .
Construct , then . Notice that
meaning , i.e. .
This proof doesn’t involve the dimension, meaning it holds for even infinite dimension.
5.
Proof 2 (finite dimension only): Proof by mathematical induction over the dimension . ,
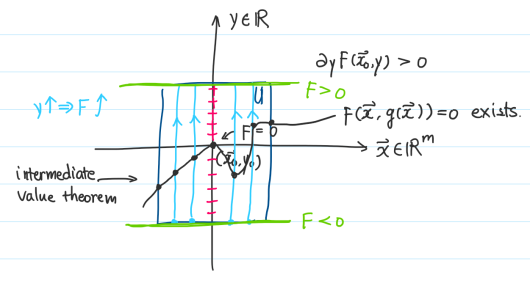
. , . Assuming , otherwise consider . See proof hint in Figure 2.4.
Figure 2.4: Implicit function theorem
Theorem 2.5.2Inverse mapping theorem. Assuming , is invertible, then there exists a
neighborhood near , a neighborhood near and a unique mapping such that , .
ProofAssuming , and is invertible. From IFT, there exists a unique such that , i.e. , hence
.
Example 2.5.1 For the matrix equation , prove that when , there exists a unique solution where .
Find an approximate expression of .
Construct where , notice that,
meaning is invertible.
According to IFT, there exists such that , , such that . , meaning is with respect to
.
Therefore, for any , . Take the derivative over ,
Take , we have , hence ,
Take the second derivative over ,
Take , we have , , hence ,
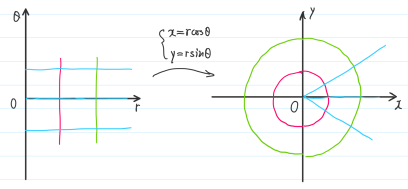
Example 2.5.2 Polar coordinate and orthogonal coordinate , we have
The mapping above . Consider its Jacobi matrix
It’s determinant is , meaning its linearly invertible. According to IMT, there exists a local inverse
mapping of .
Definition 2.5.3Assuming are 2 open sets in . is a diffeomorphism of if there exists an
inverse mapping of and .
Theorem 2.5.4Assuming is open, is a mapping of . Let , then is open in and is a
diffeomorphism of if and only if is injective and , is an invertible linear mapping.
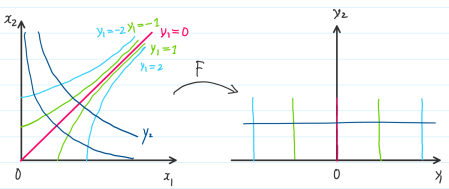
Example 2.5.3 Assuming where . Prove that is a diffeomorphism of . See Figure 2.5 for the
contour plot.
therefore is invertible. Then
So is injective. Therefore, is a diffeomorphism.
Contour plot is very useful to visualize the correspondent relation, Figure 2.5 is another
example.