8.2 知识点复习
8.2.1 第一型曲线积分
设曲线
- (1)
-
弧长:设曲线
- (2)
-
正则曲线的弧长坐标:设正则曲线
- (3)
-
第一型曲线积分:设
- (4)
-
度规:设
- (1)
-
设
- (2)
-
若
- (3)
-
第一型曲线积分的值与曲线的参数化方式无关,故为良定义的。
- (1)
-
求曲线
- (2)
-
不同坐标系中的微元弧长公式:
- 直角坐标系:
- 极坐标系:
- 柱坐标系:
- 球坐标系:
- 直角坐标系:
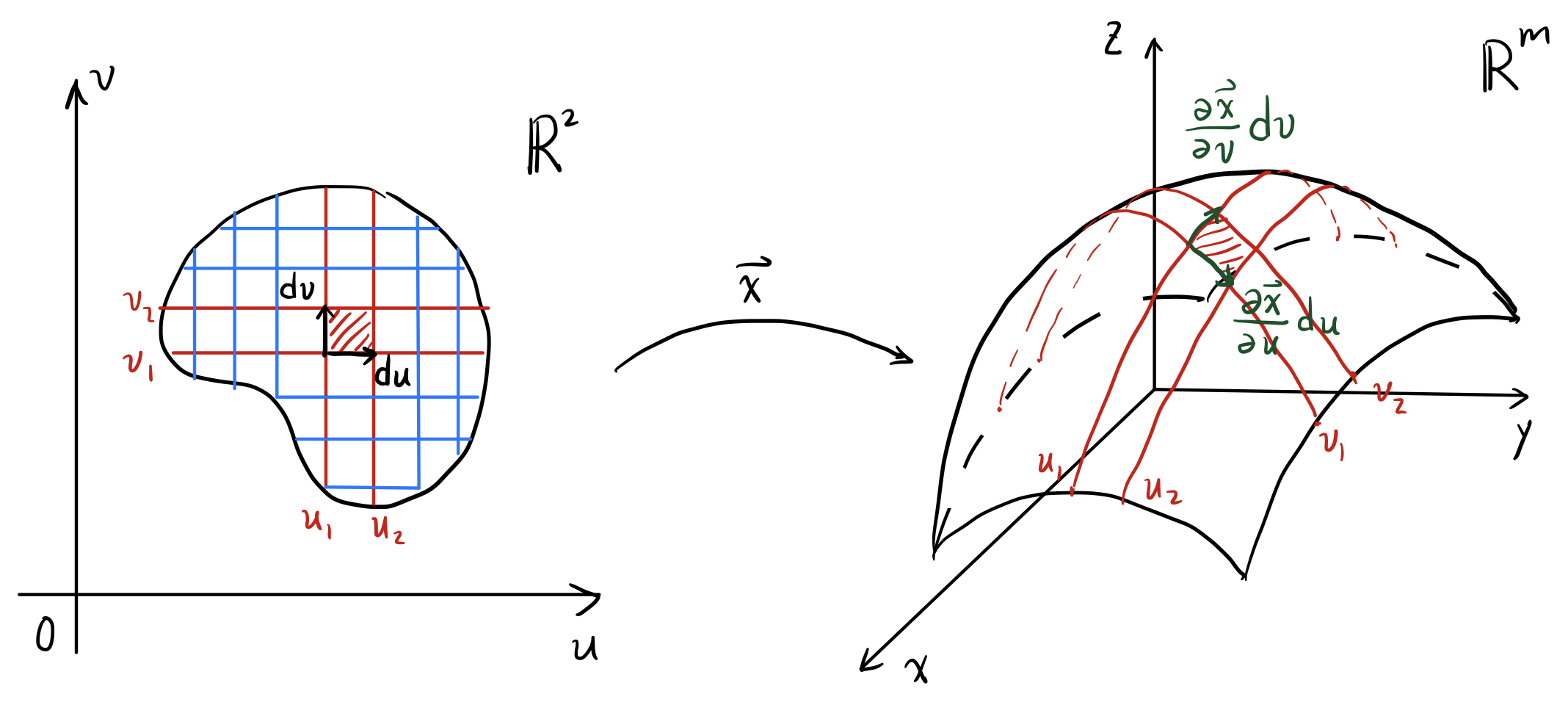
8.2.2 第一型曲面积分
类似曲线弧长,求曲面面积的一种自然想法是使用三角形对曲面进行划分,求出这些三角形面积之和的上确界。然而早在19世纪,Schwarz证明:即便对于圆柱面,任意的三角划分可使得面积之和无上界。小平邦彦在其著作中证明:如果所有三角形的顶角都大于一个给定的正数,则上面这种做法可行。因此,我们仍需借助曲面的参数化定义曲面积分。
- (1)
-
曲面的参数化:设(2维)正则曲面
- (2)
-
微元面积:用参数
- (3)
-
第一型曲面积分:设
- (4)
-
高维曲面:设
重要定理回顾 第一型曲面积分的值与曲面的参数化方式无关,故为良定义的。
- (1)
-
曲面
- (2)
-
曲线
- (3)
-
- (4)
-
半径为
8.2.3 第二型曲线积分
- (1)
-
有向曲线:设
- (2)
-
第二型曲线积分:设(连续)向量场
- (3)
-
势场:设向量场
- (4)
-
保守场:设向量场
- (5)
-
无旋场:设向量场
- (1)
-
Newton-Leibniz公式:对于
- (2)
-
势场是保守场。区域(连通的开集)上的保守场是势场。
- (3)
-
势场是无旋场。单连通区域(区域中的任意连续闭曲线可连续变换为点)上的无旋场是保守场。
- (1)
-
力做的功:
- (2)
-
流场的环量:
- (3)
-
平面流场的通量:设
- (4)
-
设
- (5)
-
设
- (6)
-
求势函数的方法:凑全微分,或利用
- (7)
-
计算:
- (8)
-
计算:
- (9)
-
容易证明
- (1)
-
这里
- (2)
-
无旋场不一定是保守场,见应用(9)。