2.2 知识点复习
2.2.1 大O和小o
重要概念回顾
以下设,,。
-
(1)
-
:称,若,,使得。
-
(2)
-
同阶:称与同阶,若且。
-
(3)
-
:称,若,,使得。
-
(4)
-
等价:称,若。
重要定理回顾
设,则等价于,其中是的第个分量。
应用
以下设。
-
(1)
-
线性映射:。
-
(2)
-
二次型:。
注
多元多项式的阶不能简单地认为是单项式的最高次幂,如,但反过来不成立。因此多元微积分中没有阶的概念,只有同阶,如与同阶。
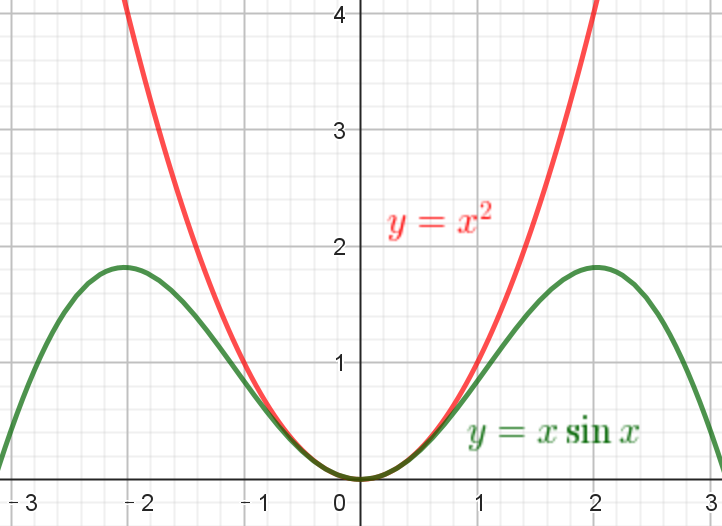
阶的概念实际上是这么引入的:我们想研究一元函数在一点附近的行为,可以用单项式来近似,近似效果最好的单项式的次数就是的阶,如图2.2.1(a)所示。如果为整数,这就是Taylor展开的主项次数。
但在多元微积分中,函数在附近的行为无法完全用来近似,如图2.2.1(b)所示。如果一定要用多项式来近似的话,可以用多元Taylor展开的思想,写成。
图 2.2.1: 一元函数与多元函数的阶
2.2.2 可导与可微
重要概念回顾
-
(1)
-
可导(可微):称在处可导(可微),若存在线性映射使得。记。若,则通常记为。
-
(2)
-
沿向量的导数:沿的导数为。若,则称为方向导数。
重要定理回顾
-
(1)
-
如果在处可微,则在任意方向的方向导数都存在,且成立
-
(2)
-
链式法则:设、,在处可微,在处可微,则在处可微,且成立
-
(3)
-
Leibniz公式:
应用
-
(1)
-
常映射、线性映射均为可微函数。
-
(2)
-
内积:设,则。
-
(3)
-
方阵:设,则。
-
(4)
-
复合内积:设在处可微,则在处可微,且
-
(5)
-
行列式:。
注
-
(1)
-
微分是线性映射,导数相当于线性映射的矩阵表示。
-
(2)
-
以上定义与一元微积分相容。相当于一个等比例函数(也是线性映射),相当于一个矩阵。
-
(3)
-
设表示维空间中的位矢,则表示速度。
-
(4)
-
在方向导数的定义中一定要注意,表示的是相反方向的方向导数。
-
(5)
-
设,则。
-
(6)
-
如果在任意方向的方向导数都存在,甚至可以不连续,如(补充定义)。
-
(7)
-
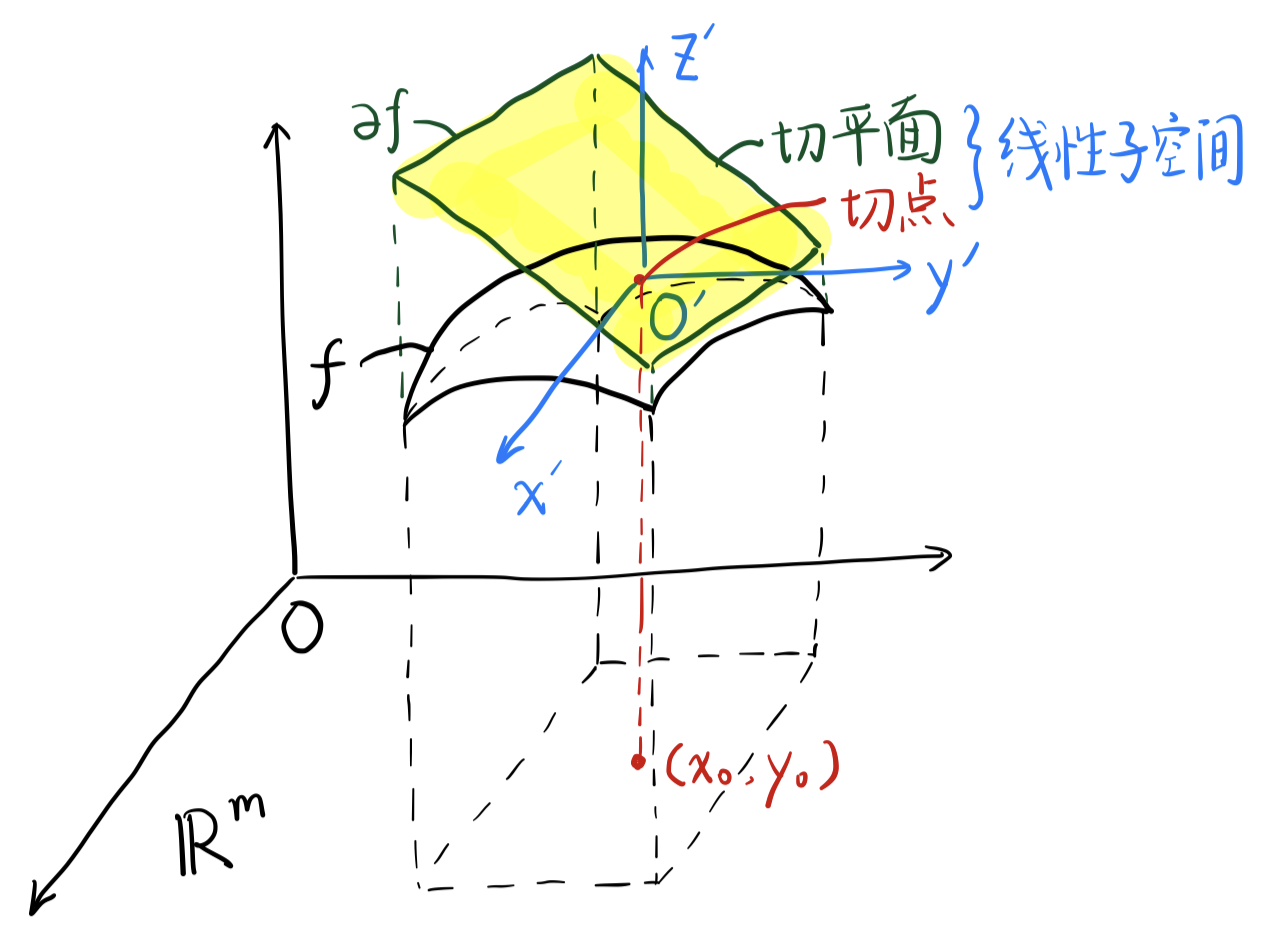
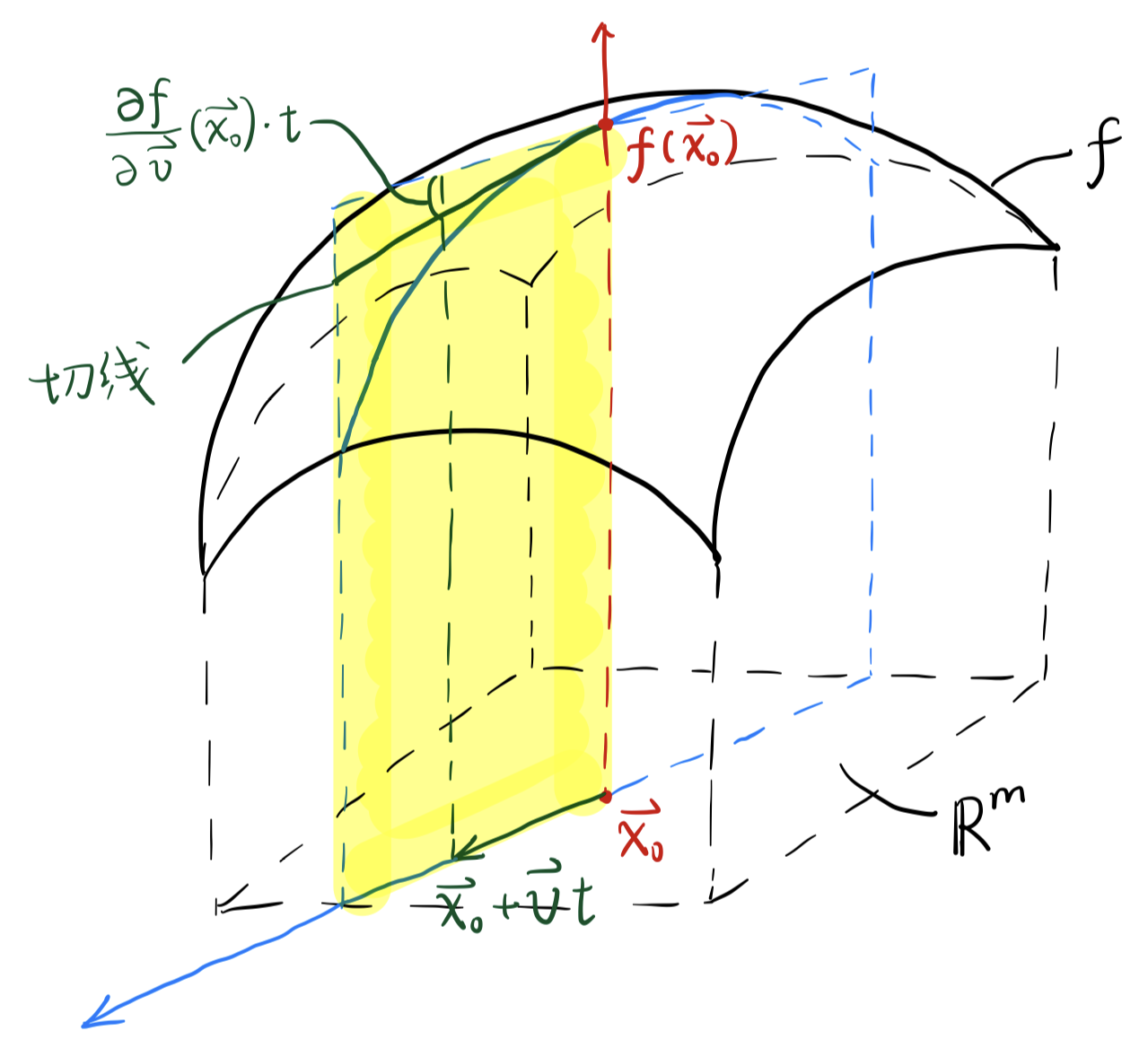
导数和方向导数的几何意义如图2.2.2所示。
图 2.2.2: 导数和方向导数的几何意义
2.2.3 偏导数
重要概念回顾
-
(1)
-
偏导数:设,是的一组基,对应的坐标向量为,则在处的偏导数为
通常选择标准正交基。
-
(2)
-
Jacobi矩阵:设,则在处的Jacobi矩阵为
重要定理回顾
-
(1)
-
全微分:设,是的一组基,对应的坐标向量为,是坐标映射函数,则在处微分为
此时的微分又称为全微分,此定理又称一阶微分的形式不变性。
-
(2)
-
链式法则:
等价于
设
则
-
(3)
-
可微连续,可微的所有偏导数存在。
-
(4)
-
如果的所有偏导数在上都连续,则在上可微。条件可放宽为:至多有1个偏导数存在。
应用
正交坐标系(直角坐标系、极/柱坐标系、球坐标系)变换的Jacobi矩阵。
注
-
(1)
-
导数是函数本身的性质,不依赖于坐标系的选取。链式法则是复合函数导数的计算方法。
-
(2)
-
Jacobi矩阵(偏导数)是导数在特定坐标系下的矩阵表示,依赖于坐标系的选取。链式法则可以转换为Jacobi矩阵的乘法。
-
(3)
-
全微分是特定映射(即陪域为,多元函数)的微分,描述了微分(线性函数)与坐标映射函数的关系。
-
(4)
-
容易证明:在的任意基底下,Jacobi矩阵(全微分)的形式保持不变。
-
(5)
-
偏导数的符号常常让人困惑,例如:设,则究竟是还是?我个人倾向于,表示的是对第一个变量求偏导后的函数,随后代入这个函数在处的值。对于另一种答案,我会用来表示。有时候为了避免歧义,会使用来表示对第一个变量求偏导。
2.2.4 梯度
重要概念回顾
设,则在处的梯度为
重要定理回顾
-
(1)
-
Riesz表示定理:设是有限维实内积空间,连续线性泛函,则存在唯一的使得。
-
(2)
-
梯度与微分、方向导数的关系:
-
(3)
-
。
-
(4)
-
Leibniz公式:
应用
-
(1)
-
内积:设,则。
-
(2)
-
行列式:,矩阵内积的定义为。
注
-
(1)
-
梯度是线性函数在中的内积表示。
-
(2)
-
梯度方向是函数的方向导数最大的方向,即函数值增长最快的方向;梯度的大小是函数最大的方向导数值。
例 2.2.1
证明梯度的Leibniz公式:
证明
首先证明乘积公式:
再证明内积公式:
2.2.5 高阶偏导数
重要概念回顾
设是的一组基,对应的坐标向量为,函数,则在处的阶偏导数为
重要定理回顾
-
(1)
-
如果函数的所有阶偏导数都连续,记作,则的阶偏导数的值与求导顺序无关。
-
(2)
-
设函数、,则。
-
(3)
-
设函数、映射(意为的每一个分量),则。
应用
-
(1)
-
计算平面Laplace算子在极坐标系下的表示。
-
(2)
-
证明:矩阵求逆算子在其定义域内是的。
注
-
(1)
-
阶偏导数共有个。
-
(2)
-
当时,设矩阵满足,则称为Hesse矩阵。
-
(3)
-
当高阶偏导数的值与求导顺序无关时,偏导数可简写为,其中。
2.2.6 *协变与逆变
设、是的两组基,从到的基变换矩阵满足
易知可逆。
现在我们考虑向量在这两组基上展开的坐标向量,分别记、。假设之间存在变换
注意到
故有
由此证明了“若存在,则”,代入验证即可得到的存在性。因此坐标向量的变换形式为
它的变换矩阵是基变换矩阵的逆矩阵。我们把所有类似坐标向量变换方式的变换称为逆变。
现在我们考虑偏导数算子的变换,根据链式法则易得
由于,故有
因此偏导数算子的变换形式为
它的变换矩阵和基变换矩阵相同。我们把所有类似基变换方式的变换称为协变。全微分算子是协变算子。
逆变指标一般写在上标位置,协变指标一般写在下标位置,我们后面也将采用此记号。
2.2.7 *曲面坐标系(1)
在中,利用我们熟悉的直角坐标系,可以定义曲面坐标系为
上式就是直角坐标系到曲面坐标系的坐标变换。为保证相互独立,应当要求Jacobi矩阵可逆,即
例 2.2.2
柱坐标系、球坐标系(如图2.2.3所示)与直角坐标系的坐标变换为
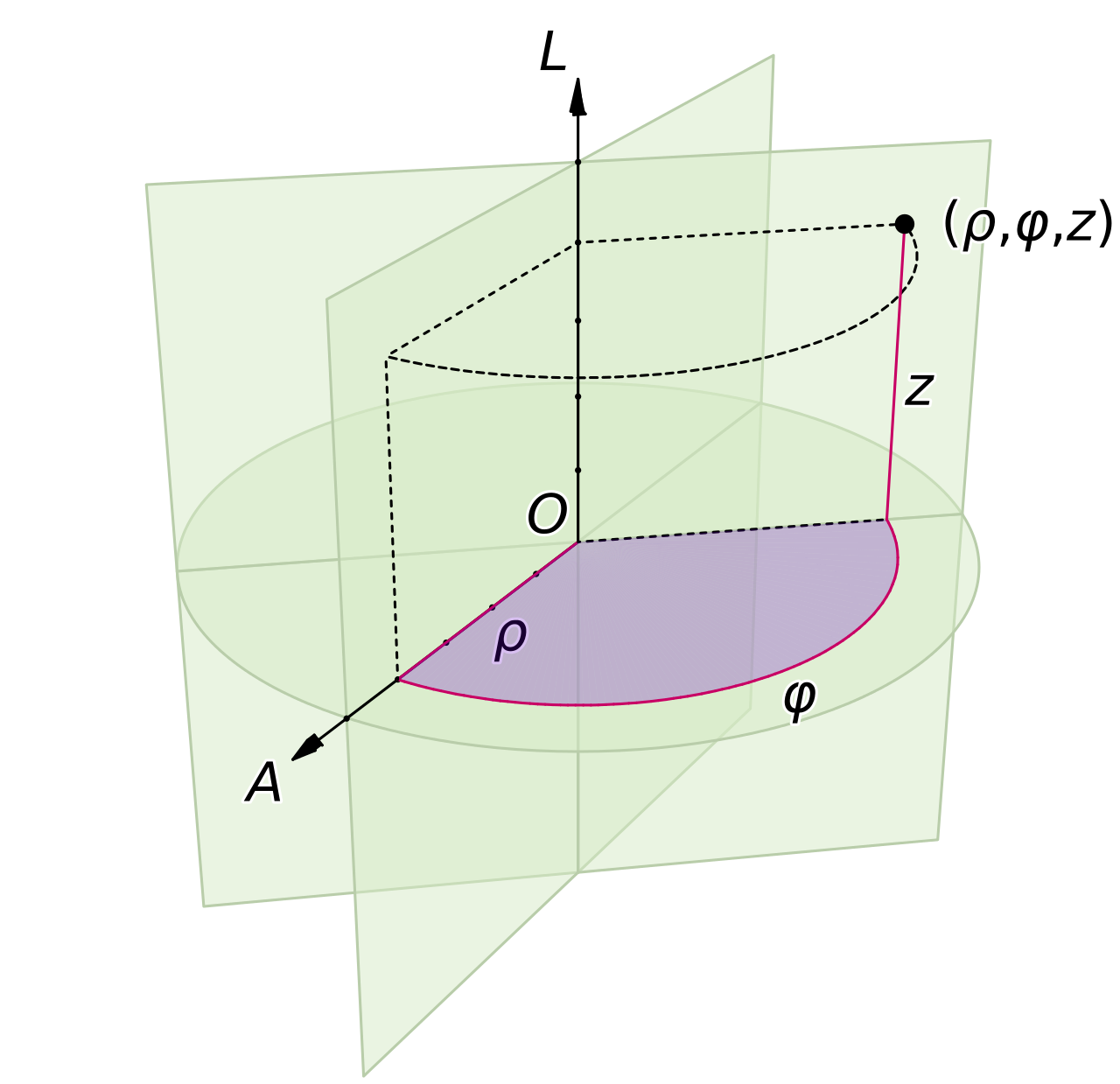
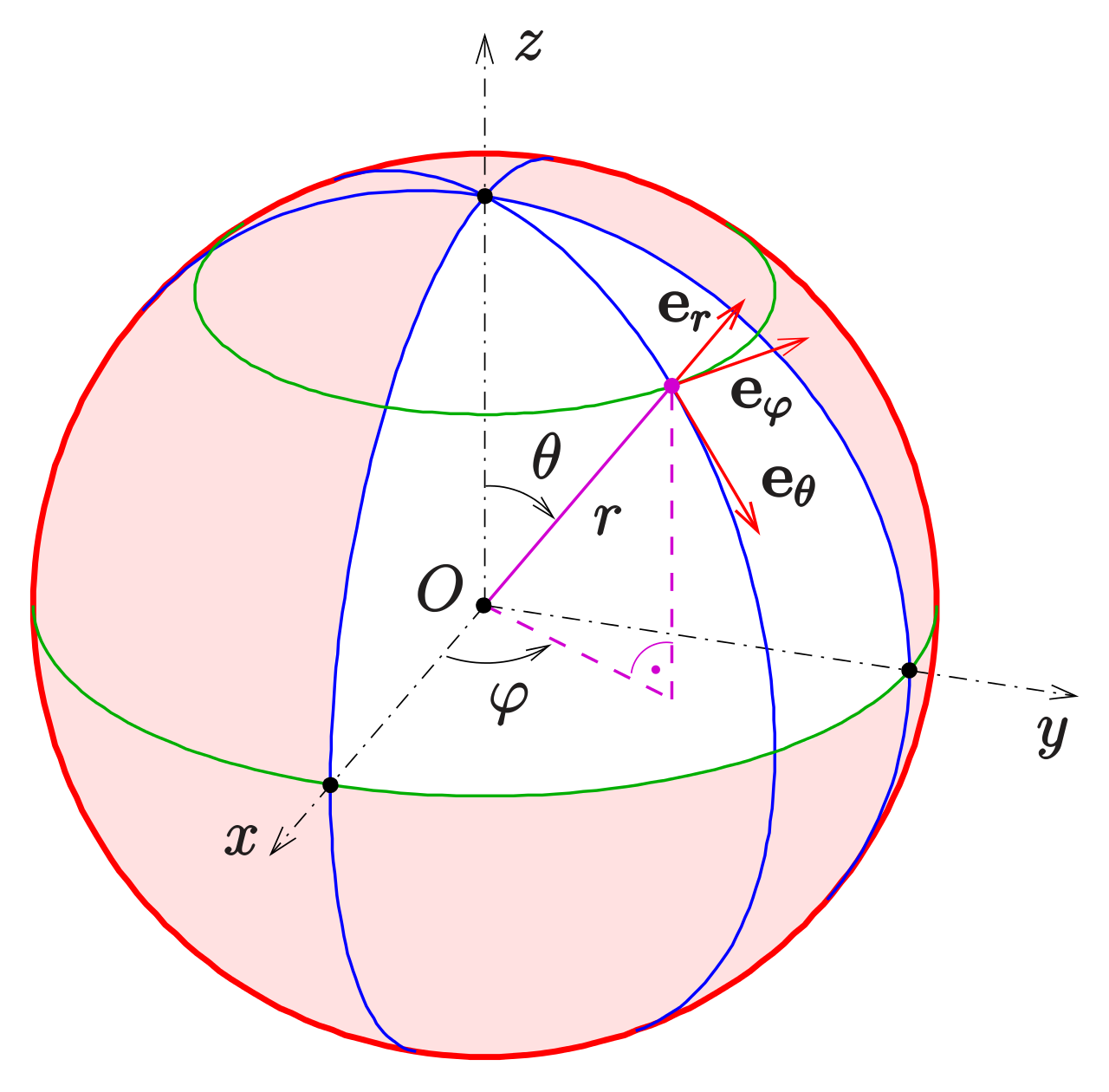
图 2.2.3: 柱坐标系与球坐标系
有了坐标系后,我们就可以定义坐标系的基向量:
- 协变基向量:。对应的坐标向量称为逆变分量。
- 逆变基向量:。对应的坐标向量称为协变分量。
- 正交归一基:可选择以上基向量进行Gram-Schmidt正交化,得到正交归一基向量。对应的坐标向量(无所谓上下标)称为物理分量。
定理 2.2.3
容易验证:。
定义空间的度规为
与此同时,定义
容易验证。
对空间的任意一点,如果通过该点的三个坐标面总是互相垂直的,这个坐标系就称为正交曲面坐标系。坐标面垂直等价于其法向量相互垂直,亦即为对角矩阵。因此
定理 2.2.4
如果度规是对角矩阵,则此坐标系为正交曲面坐标系;此时正交归一基,其中;物理分量满足
度规与(微元)弧长也存在联系。计算可知
在我们熟悉的直角坐标系中,有
例 2.2.5
直角坐标系、柱坐标系、球坐标系均为正交曲面坐标系。请分别写出直角坐标系、柱坐标系、球坐标系下的弧长表达式。
解
计算可知
在实际运用中,可不必计算、依赖朴素的物理直觉得到以上三式。
利用定义式计算度规较为麻烦,在实际运用中通常会借助坐标变换的Jacobi矩阵来计算度规。
定理 2.2.6
设从直角坐标系变换到的Jacobi矩阵为,则度规与Jacobi矩阵的关系为
证明
已知Jacobi矩阵的定义为
由于Jacobi矩阵可逆,因此
弧长的定义为
因此
(未完待续)
2.2.8 *全微分与梯度
度规可以帮助我们得到正交曲面坐标系下的梯度算符。
定理 2.2.7
是梯度算符的协变微分形式。在正交曲面坐标系中,设为函数,则
证明
证明参考。设为正交曲面坐标系中的一点,定义方向的单位向量为,其满足
则的全微分可表示为
故有
设为函数,则的全微分可表示为
根据Riesz表示定理,存在唯一的使得
因此
在更一般的坐标系中,我们有下面的结论:
例 2.2.8
设是中的一组基,对应的坐标向量为,试用来表示梯度算子。
解
设,,则
记度规,由(全)微分的定义可知
因此
当是标准正交基时,。
由此我们发现,此即梯度在协变基向量下的坐标向量表示。在此基础上,我们可以进一步证明:
定理 2.2.9
设是的两组基,对应的坐标向量分别为,两者之间的坐标变换满足
则有
亦即在协变基向量的坐标表示下,全微分算子是协变的,梯度算子是逆变的。
证明
由链式法则可得
设为直角坐标系,令、,则有,且
计算可得
在正交曲面坐标系中,正交归一基更为常用,此时梯度的物理分量表示为
2.2.9 *线性映射的伴随
设为矩阵,的转置矩阵的定义为。然而,对于一般的线性映射,以上定义不便操作,故我们可借助内积来定义线性映射的伴随。设是线性映射,则的伴随映射也是个线性映射,其满足
容易证明这个定义与矩阵转置的定义等价。方便起见,以下省略内积的下标。
线性映射与其伴随的Jacobi矩阵满足什么关系呢?
设、分别是的一组基,对应的坐标向量为、,记,则有
故
同理
注意到
记度量矩阵、,它们都是对称矩阵,则上式可写为
当为标准正交基时,且,此时。